MCA Data Server

The MCA Data Server (MDS) provides client access to all of Bridgeport's MCA.
Purpose
Data acquisition and device driver: The purpose of the MCA Data Server is to provide high-level access to the radiation detectors and their MCA's. It acts as a bridge between the MCA's on the USB side and clients on the internet. Being a true server, the MDS can be accessed by client software written in 40+ diferent programming languages.
Hardware simulator: The MDS can launch a simulator to model Bridgeport's MCAs. This "try-before-you-buy" feature is also useful to write and test data-acquisition client code when working from home without direct access to the MCA and a detector.
Software stack:The MDS is a layered software stack. Most often a client gains access through the ZMQ server interface – virtually in any programming language they desire. Alternatively, client software can access the command layer or the API layer directly using Python.
Commands sent to the ZMQ server interface are sent as JSON strings of the form
See the MDS documentation for a detailed description of all MDS commands.
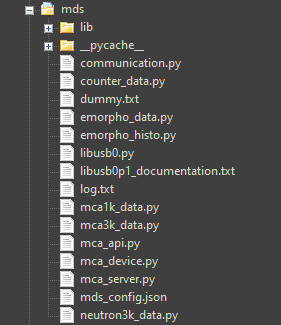
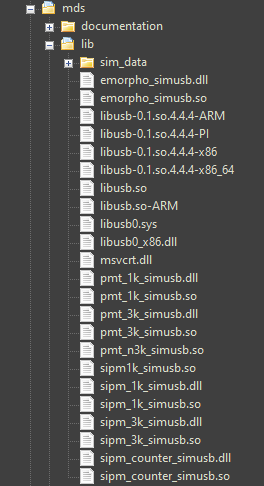
The MDS source files are in the folder /wxMCA/mds/
There are also commands that address the MDS itself, as opposed to detector commands, eg get_pid and exit.